Scoring a job through Robotics Internship
When you plan it right!
This blog post is about my experience while developing a C++ library for motion planning during my third year “internship”. This is about how after failing to secure an internship for summers, I try to rescue my self-confidence by taking up an ambitious summer project. Going in a direction orthogonal to what was planned and finally making something I am proud of. This is both, my experiences and a very short introduction to the library I developed.
Almost an year ago from now (03-07-2017 11:10 PM), the beginning of the summer break, I was at one of the lowest points during my stay at IIT Kanpur. I had applied to only three companies for internship through the SPO and was not able to secure an internship since two of them decided to not take any student and was rejected by the third after an interview. Looking back at that time is amusing now and often forms the larger part of all the internship/placement fundae that I give to my juniors.
To utilize my summer productively, I decided to work on a project with Dr. Bhaskar Dasgupta who was the then faculty advisor of the Robocon Team. We decided to work on a project that we had talked about earlier during one of the Robocon team meetings. The project was to build a robot which could navigate in an unknown environment, build maps and do some form of path planning (It was not the good ol’ SLAM problem, trust me :-P). I was excited and overwhelmed at the same time. The task seemed insurmountable and there was so much to learn. I spent some time reading random stuff from the internet and after another meeting with my mentor, we decided that for the moment I should study and implement some path planning algorithms and we would decide how to go ahead at a later stage.
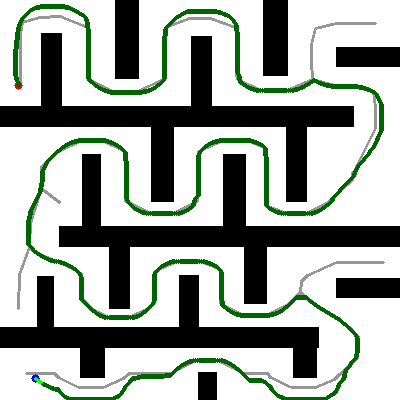
This time, I studied a few standard motion planning algorithms and started thinking of how to simulate them. At this point, I must admit the MATLAB is not one of my favourites and I always try to find a reason for using C++. This was the perfect opportunity since I could not find a simple framework to simulate these algorithms and I admit that I did not try hard enough (or try at all! ). I convinced myself that this task was too computationally intensive to be handled by python and the only option I had was to use C++. I ended up writing about 200 lines of code to display a minimal (ugly) GUI which allowed the user to load a map (Illustration 1) and select the starting and ending points for computing the path and the program would then show an animation of the planning algorithm finding the path. I showed it to my mentor, he liked it and encouraged me to simulate another algorithm. This time, I decided, as any good software engineer would do, that I should divide my program into modules which share their functionality instead of replicating the code for every simulation I make. It was this second simulation which changed the direction of my summer project altogether.
Long story short, I had now completely forgotten about the original problem statement and was focusing on problems like: How to factor out the pathplanning algorithms into composable components? What are the basic components of a path planning problem? What would a sensible API for path planning look like? I tackled these questions for 5-6 weeks while writing some prototypes, making flowcharts etc.
While I was brainstorming on the design of this library, I would think of the behavior of each of the component on an algorithm, does it form a logical entity? What behaviors of the component to hide and what to expose to the user? Are the classes in this code a good representation of the objects in real world? I do not remember what all were the ideas I came up with since it has been almost an year since I started working on it but what I do remember is how after several weeks I was finally happy with the design after about 5 complete rewrites of the entire code (over ~1.5k lines of code). Here is the structure I came up with:
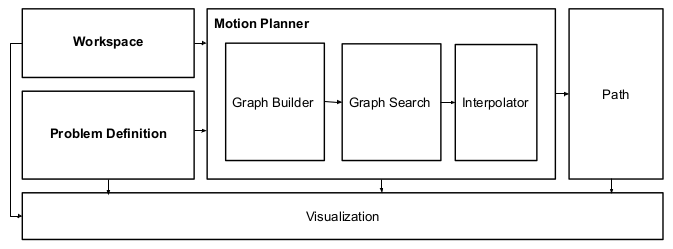
Workspace contains the map of the environment. I defined it as a separate class so that it is possible to hide the implementation from other modules. Problem definition contains start and end points at the moment. It can be extended to incorporate way-points or other path constraints that the user might be interested in. The graph builder takes a workspace and discards all the information not required for planning the path thus forming a good representation of the workspace. The graph search algorithm searches this graph for paths which are then interpolated using the interpolator to generate smooth paths.
Workspace contains the map of the environment. I defined it as a separate class so that it is possible to hide the implementation from other modules. Problem definition contains start and end points at the moment. It can be extended to incorporate way-points or other path constraints that the user might be interested in. The graph builder takes a workspace and discards all the information not required for planning the path thus forming a good representation of the workspace. The graph search algorithm searches this graph for paths which are then interpolated using the interpolator to generate smooth paths.
I won’t go more into the library in this post since the library has some documentation at lakshayg.github.io/mpel. The source code for this library is available on GitHub at github.com/lakshayg/mpel. I would recommend you to visit the link and have a look at the library and feel free to make changes and contribute to the code. I close this post with some examples of paths generated using different path planning algorithms: