Our Projects
Explore the cutting-edge robotic systems built by students under the mentorship of Robotics Club IITK.
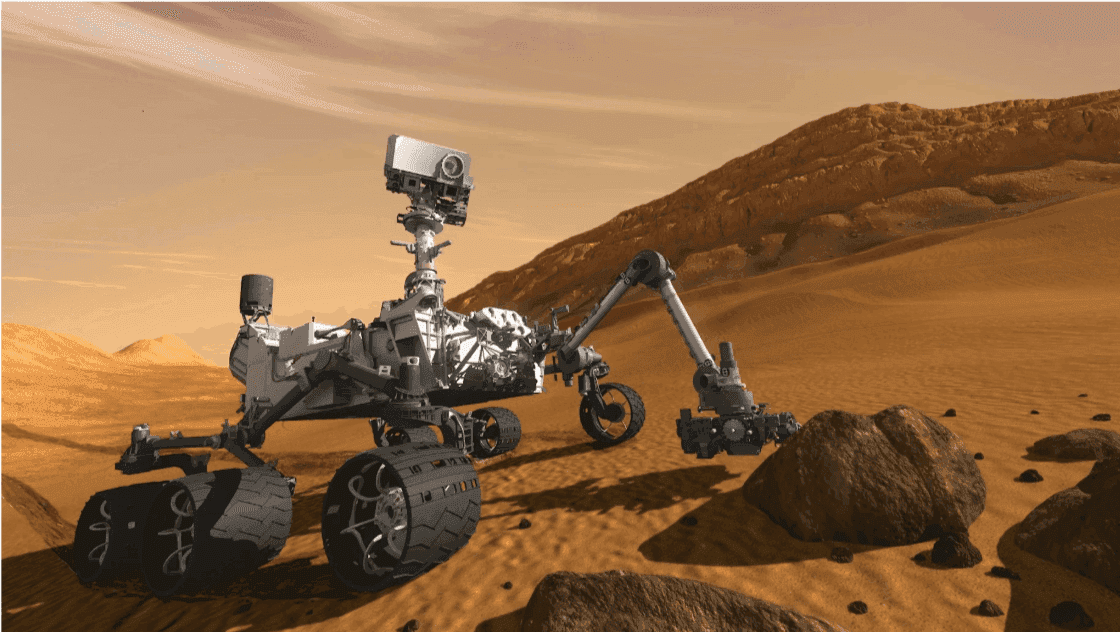
Rover
A rover is an autonomous or remote-controlled vehicle designed to traverse extraterrestrial terrain. Equipped with specialized sensors and robust suspension, it explores planetary surfaces, collects vital geological samples, and searches for biological presence
Quadruped Robot
A bio-inspired four-legged robot designed to mimic animal-like walking gaits for stable locomotion. It implements Inverse Kinematics to coordinate its 12-DOF servo joints, allowing the platform to navigate uneven terrain by lifting and placing each leg while maintaining constant static balance via real-time remote mapping.

Autonomous Navigation Robot
An intelligent mobile robot platform built to navigate indoor and outdoor environments without human intervention. Using a 2D LiDAR scanner paired with wheel encoders and an IMU, the bot performs sensor fusion to map unknown spaces, localize its precise position, and compute real-time collision-free paths around dynamic obstacles.

DUM E (Robotic Manipulator)
A 4-DOF desktop robotic arm equipped with a mechanical gripper designed to execute smooth pick-and-place and manipulation tasks. Integrated with a computer vision pipeline, the system tracks real-time human hand gestures and depth profiles, utilizing Inverse Kinematics and PID control to translate user movements into precise, physical actuator trajectories.

Goalkeeper Robot
An elite reactive robotic system engineered to track, predict, and physically intercept fast-moving projectiles in real-time. It pairs low-latency OpenCV tracking with predictive trajectory filtration models, calculating the precise intercept point on the fly to drive high-speed digital servos for instantaneous defensive blocking.

Hexapod (6-legged robot)
A hexapod is a six-legged robot using biomimetic walking gaits for superior stability. Unlike wheeled rovers, it employs Inverse Kinematics to navigate extreme, uneven terrain by lifting and placing each leg, ensuring constant static balance.

Mechanical Turk
The Mechanical Turk at the IITK Robotics Club is an autonomous chess-playing robot. It uses Computer Vision to detect opponent moves, a chess engine for strategy, and a 2-DOF robotic arm with an electromagnet to physically move the pieces.

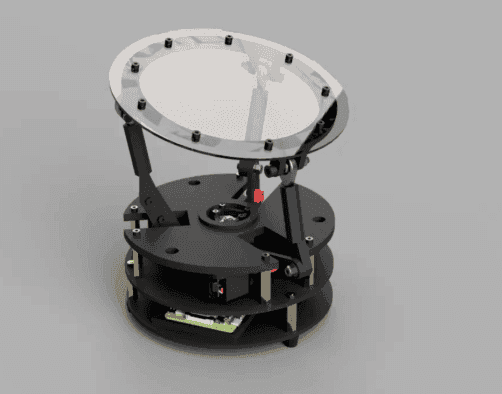
Ball Balancing Bot
A Ball Balancing Bot is a dynamically stable robot that maintains its center of gravity over a single spherical wheel. Using omni-wheels and high-speed IMU feedback, it performs continuous micro-adjustments to remain upright, offering 360-degree maneuverability in tight spaces.
StepXplorer
StepXplorer is an autonomous stair-climbing robot at the IITK Robotics Club. It uses ultrasonic sensors for distance-based stair detection and stepper motors for high-precision motion control, ensuring stable ascent and real-time failure recovery during vertical transitions.
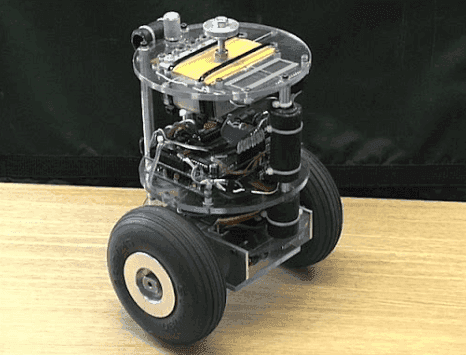
GyroBot
A Gyrobot is a self-balancing robot that maintains its upright posture using gyroscopic precession. Unlike common two-wheeled balancers, it often uses an internal high-speed flywheel to generate a corrective torque, allowing it to remain stable even when completely stationary.